


Accuracy and Speed Improvement of Event Camera Motion Estimation Using a Bird's-Eye View Transformation
Title: Accuracy and Speed Improvement of Event Camera Motion Estimation Using a Bird's-Eye View Transformation
Authors: Takehiro Ozawa, Yusuke Sekikawa, and Hideo Saito
Journal: Sensors, Vol: 22, Issue: 3 (2022)
DOI: 10.3390/s22030773
Abstract:
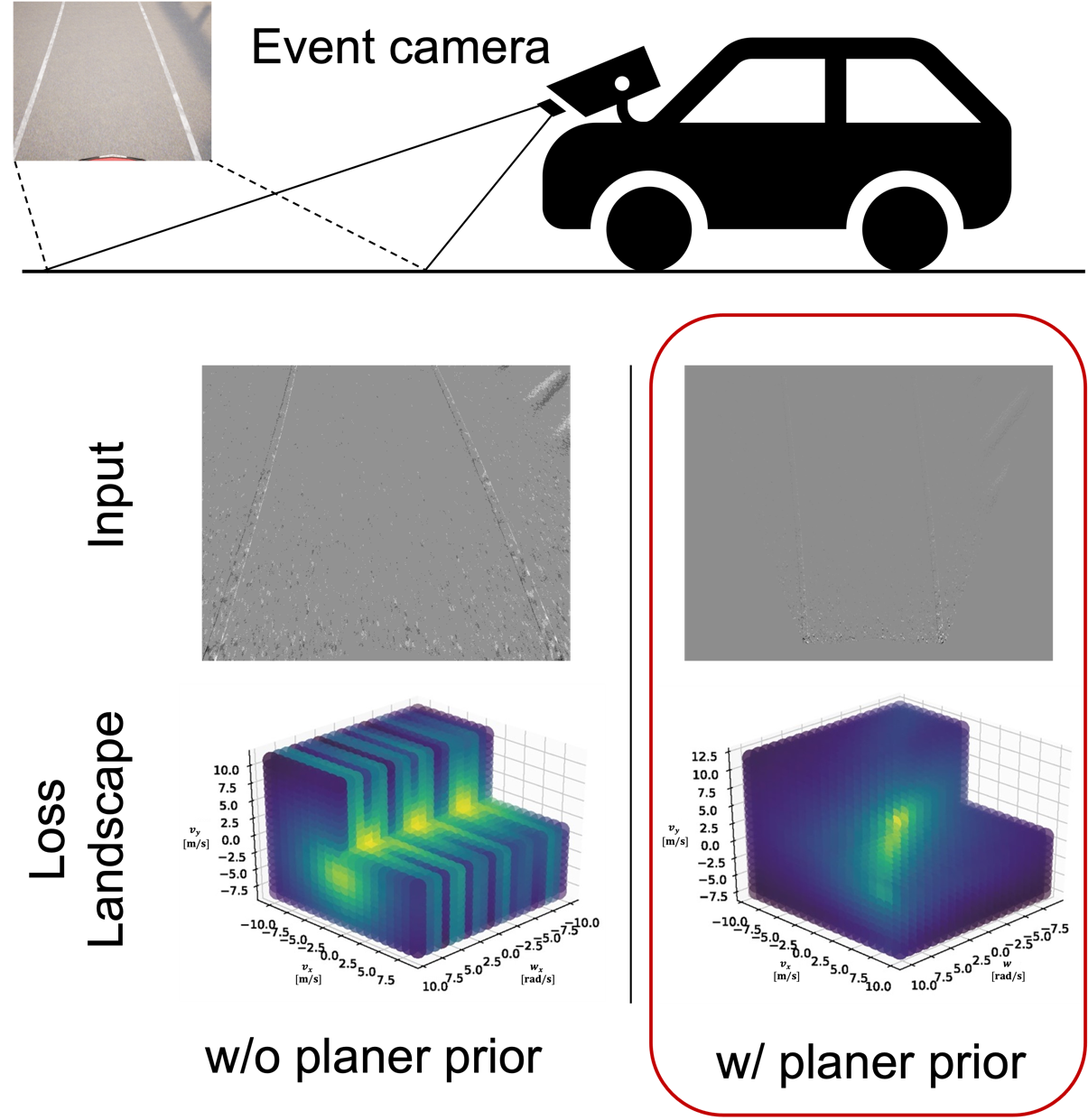
Event cameras are bio-inspired sensors that have a high dynamic range and temporal resolution. This property enables motion estimation from textures with repeating patterns, which is difficult to achieve with RGB cameras. Therefore, motion estimation of an event camera is expected to be applied to vehicle position estimation. An existing method, called contrast maximization, is one of the methods that can be used for event camera motion estimation by capturing road surfaces. However, contrast maximization tends to fall into a local solution when estimating three-dimensional motion, which makes correct estimation difficult. To solve this problem, we propose a method for motion estimation by optimizing contrast in the bird's-eye view space. Instead of performing three-dimensional motion estimation, we reduced the dimensionality to two-dimensional motion estimation by transforming the event data to a bird's-eye view using homography calculated from the event camera position. This transformation mitigates the problem of the loss function becoming non-convex, which occurs in conventional methods. As a quantitative experiment, we created event data by using a car simulator and evaluated our motion estimation method, showing an improvement in accuracy and speed. In addition, we conducted estimation from real event data and evaluated the results qualitatively, showing an improvement in accuracy.
Related Articles:
- Recursive Contrast Maximization for Event-Based High-Frequency Motion Estimation. IEEE Access, Vol. 10, pp. 125376-125386 (2022). DOI: 10.1109/ACCESS.2022.3225536.
- Neural Implicit Event Generator for Motion Tracking. International Conference on Robotics and Automation (ICRA), (2022). DOI: 10.1109/ICRA46639.2022.9812142
- Simultaneous 3D Tracking and Reconstruction of Multiple Moving Rigid Objects. 2019 12th Asia Pacific Workshop on Mixed and Augmented Reality (APMAR), (2019). DOI: 10.1109/APMAR.2019.8709158